The Oerlemans & Nick frontal ablation parameterization in OGGM#
Note
The calving parameterization in OGGM has been developped for versions of OGGM before 1.6 (mostly: 1.5.3).
The v1.6 series brought several changes in the mass balance calibration which made a lot of the calibration code obsolete and in need of updates. As of today (April 2026), calving dynamics are implemented in the dynamical model and they work, as illustrated below. A recent PR by Beatriz Recinos further improved the model by adding the calving parameterization to the default OGGM solver, which is what we use below.
However, there is quite some work to make calving (including calibration) fully operational for large scale runs. OGGM’s calving is used operationally by PyGEM - which means it can be done!
See this github issue for a longer discussion.
We implement the simple frontal ablation parameterization of Oerlemans & Nick (2005) in OGGM’s flowline model:
With \(H_f\), \(d\) and \(w\) the ice thickness, the water depth and the glacier width at the calving front, \(F_{calving}\) the calving flux in units m\(^3\) yr\(^{-1}\) and \(k\) a scaling parameter that needs to be calibrated (units: yr\(^{-1}\)). Another way to see at this equation is to note that the frontal calving rate \(\frac{F_{Calving}}{H_f w}\) (m yr\(^{-1}\)) is simply the water depth scaled by the \(k\) parameter.
Malles et al., 2023 introduces some changes to the physics and numerics of calving. We illustrate its use at the end of this notebook.
import numpy as np
import pandas as pd
import xarray as xr
import time, os
import matplotlib.pyplot as plt
from oggm.core.massbalance import ScalarMassBalance
from oggm import cfg, utils, workflow, tasks, graphics
from oggm.tests.funcs import bu_tidewater_bed
from oggm.core.flowline import TrapezoidalBedFlowline, SemiImplicitModel
cfg.initialize(logging_level='WARNING')
cfg.PARAMS['cfl_number'] = 0.01
cfg.PARAMS['use_multiprocessing'] = True
cfg.PARAMS['mp_processes'] = 4
cfg.PARAMS['tidewater_type'] = 4
cfg.PARAMS['clip_tidewater_border'] = True
cfg.PARAMS['use_kcalving_for_inversion'] = True
cfg.PARAMS['use_kcalving_for_run'] = True
2026-07-20 13:10:59: oggm.cfg: Reading default parameters from the OGGM `params.cfg` configuration file.
2026-07-20 13:10:59: oggm.cfg: Multiprocessing switched OFF according to the parameter file.
2026-07-20 13:10:59: oggm.cfg: Multiprocessing: using all available processors (N=4)
2026-07-20 13:10:59: oggm.cfg: PARAMS['cfl_number'] changed from `0.02` to `0.01`.
2026-07-20 13:10:59: oggm.cfg: Multiprocessing switched ON after user settings.
2026-07-20 13:10:59: oggm.cfg: PARAMS['tidewater_type'] changed from `2` to `4`.
2026-07-20 13:10:59: oggm.cfg: PARAMS['use_kcalving_for_inversion'] changed from `False` to `True`.
2026-07-20 13:10:59: oggm.cfg: PARAMS['use_kcalving_for_run'] changed from `False` to `True`.
FluxBasedModel “default” implementation#
The implementation in OGGM’s flowline model was relatively straightforward but required some tricks. You can have a look at the code here, but in short:
the terminus thickness \(H_f\) is defined as the last grid point on the calving flowline with its surface elevation above the water level. That is, if small chunks of ice after that are below water, their thickness is not used for the calving equation.
the calving flux computed with the equation above is added to a “bucket”. This bucket can be understood as “ice that has calved but has not yet been removed from the flowline geometry”. We remove this bucket from the total flowline volume when computing model output, though.
when there is ice below water (e.g. due to ice deformation at the front) and the bucket is large enough, remove it and subtract its volume from the bucket.
if, after that, the bucket is larger than the total volume of the last flowline grid point above water (the calving front), remove the calving front (calve it) and subtract its volume from the bucket.
To avoid numerical difficulties, we introduce a “flux limiter” at the glacier terminus. The slope between the last grid point above water (the calving front) and the next grid point (often: the sea bed) is cropped to a maximum threshold (per default: the difference between the calving front altitude and the water level) in order to limit ice deformation. See the example below for details.
Idealized experiments#
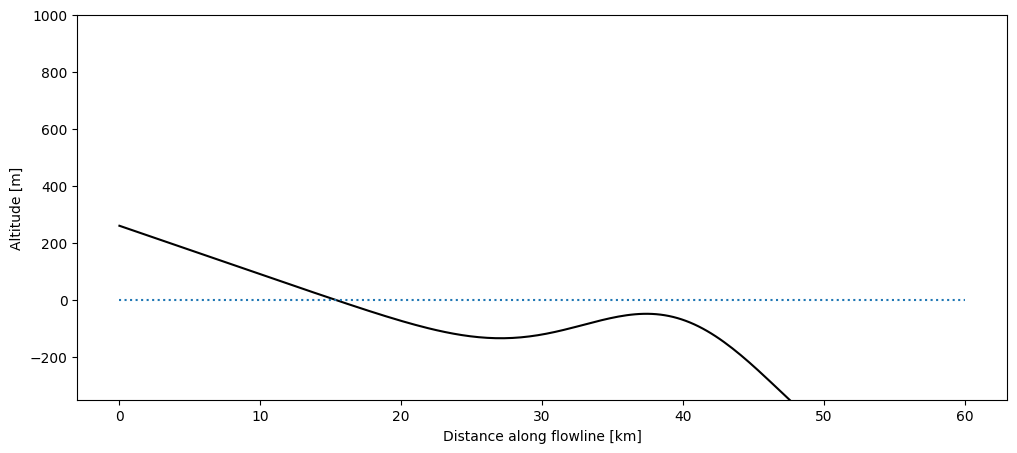
We use the idealized bed profile from Oerlemans & Nick (2005) and Bassis & Ultee (2019). This profile has a deepening followed by a bump, allowing to study quite interesting water-depth – calving-rate feedbacks:
bu_fl = bu_tidewater_bed(bed_shape='trapezoidal', lambdas=0.0)[0]
xc = bu_fl.dis_on_line * bu_fl.dx_meter / 1000
f, ax = plt.subplots(1, 1, figsize=(12, 5))
ax.plot(xc, bu_fl.bed_h, color='k')
plt.hlines(0, *xc[[0, -1]], color='C0', linestyles=':')
plt.ylim(-350, 1000); plt.ylabel('Altitude [m]'); plt.xlabel('Distance along flowline [km]');
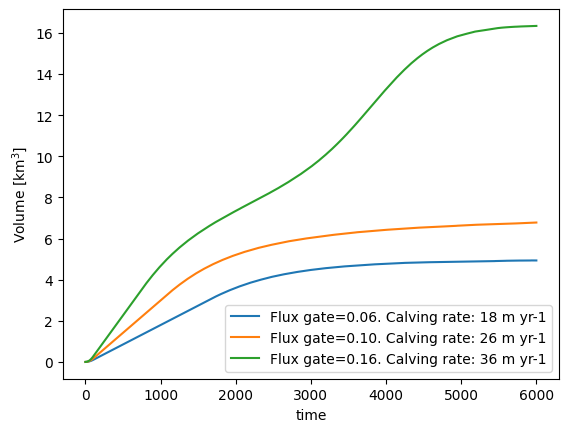
We create a simple experiment where the surface mass-balance is zero in the entire domain. Ice enters via a flux gate on the left (unit: m\(^{3}\) s\(^{-1}\)). We can vary the amount of ice entering the domain via the flux gate. We let the glacier grow until equilibrium with three different flux values:
mb_model = ScalarMassBalance()
to_plot = None
keys = []
for flux_gate in [0.06, 0.10, 0.16]:
model = SemiImplicitModel(
bu_tidewater_bed(bed_shape='trapezoidal', lambdas=0.0), # use your trapezoid builder
mb_model=mb_model,
flux_gate=flux_gate,
do_calving=True,
calving_k=0.2,
water_level=0.0,
cfl_number=0.5, # optional, if you want similar strictness
)
# long enough to reach approx. equilibrium
ds = model.run_until_and_store(6000)
df_diag = model.get_diagnostics()
if to_plot is None:
to_plot = df_diag
key = 'Flux gate={:.02f}. Calving rate: {:.0f} m yr-1'.format(flux_gate, model.calving_rate_myr)
to_plot[key] = df_diag['surface_h']
keys.append(key)
# Plot of volume
(ds.volume_m3 * 1e-9).plot(label=key);
plt.legend(); plt.ylabel('Volume [km$^{3}$]');
to_plot.index = xc
f, ax = plt.subplots(1, 1, figsize=(12, 5))
to_plot[keys].plot(ax=ax)
to_plot.bed_h.plot(ax=ax, color='k')
plt.hlines(0, *xc[[0, -1]], color='C0', linestyles=':')
plt.ylim(-350, 1000); plt.ylabel('Altitude [m]'); plt.xlabel('Distance along flowline [km]');
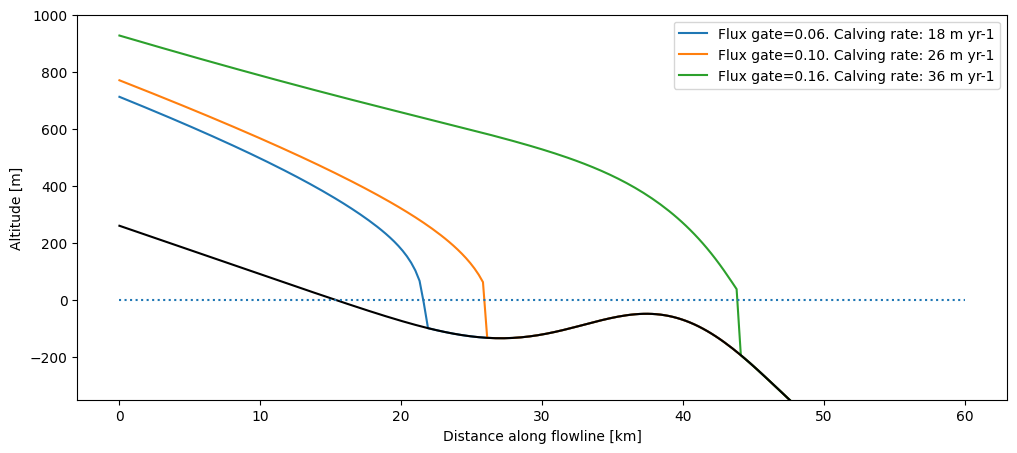
The larger the incoming ice flux, the bigger and longer the glacier. If the flux is large enough, the glacier will grow past the deepening and the bump, until the water depth and the calving rate become large enough to compensate for the total ice entering the domain.
Flux limiter#
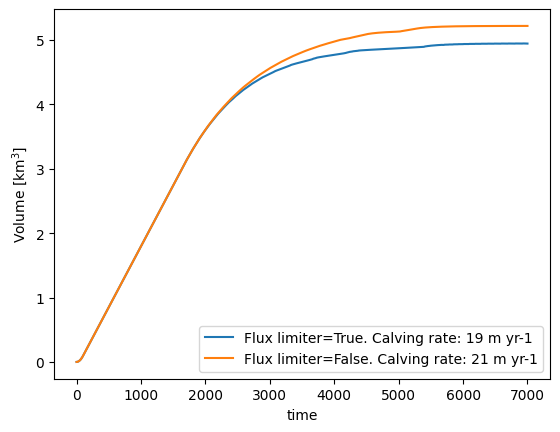
The frontal “free board” (the height of the ice above water at the terminus) is quite high in the plot above. This is because we use a “flux limiter”, effectively reducing the shear stress at the steep glacier front and avoiding high velocities, simplifying the numerics. This limiter is of course arbitrary and non-physical, but we still recommend to switch it on for your runs. Here we show the differences between two runs (with and without flux limiter):
to_plot = None
keys = []
for limiter in [True, False]:
model = SemiImplicitModel(bu_tidewater_bed(bed_shape='trapezoidal', lambdas=0.0),
mb_model=mb_model,
water_level=0.0,
is_tidewater=True,
calving_use_limiter=limiter, # default is True
flux_gate=0.06, # default is 0
calving_k=0.2, # default is 2.4
do_calving=True
)
# long enough to reach approx. equilibrium
ds = model.run_until_and_store(7000)
df_diag = model.get_diagnostics()
if to_plot is None:
to_plot = df_diag
key = f"Flux limiter={limiter}. Calving rate: {model.calving_rate_myr:.0f} m yr-1"
to_plot[key] = df_diag["surface_h"]
keys.append(key)
(ds.volume_m3 * 1e-9).plot(label=key)
plt.legend(); plt.ylabel('Volume [km$^{3}$]');
to_plot.index = xc
f, ax = plt.subplots(1, 1, figsize=(12, 5))
to_plot[keys].plot(ax=ax)
to_plot.bed_h.plot(ax=ax, color='k')
plt.hlines(0, *xc[[0, -1]], color='C0', linestyles=':')
plt.ylim(-350, 1000); plt.ylabel('Altitude [m]'); plt.xlabel('Distance along flowline [km]');
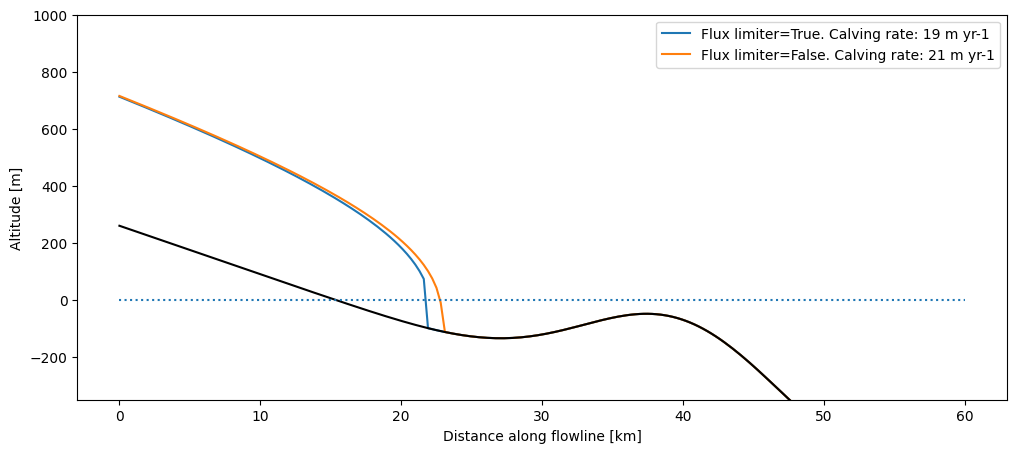
For the rest of this notebook, we will keep the flux limiter on. It is also switched on per default in OGGM.
# see
cfg.PARAMS['calving_use_limiter']
True
Water-depth – calving-rate feedbacks#
Let’s have some fun! We apply a periodic forcing to our glacier and study the advance and retreat of our glacier (the simulation below can take a couple of minutes to run).
years = np.arange(6001)
flux = 0.4 + 0.4 * np.sin(2 * np.pi * years / 5000)
def flux_gate(year):
return flux[int(year)]
model = SemiImplicitModel(bu_tidewater_bed(bed_shape='trapezoidal', lambdas=0.0),
mb_model=mb_model,
is_tidewater=True,
glen_a=cfg.PARAMS['glen_a']*3, # make the glacier flow faster
flux_gate=flux_gate, # default is 0
calving_k=1, # default is 2.4
do_calving=True
)
t0 = time.time()
ds = model.run_until_and_store(len(flux)-1)
print('Done! Time needed: {}s'.format(int(time.time()-t0)))
Done! Time needed: 50s
# Prepare the data for plotting
df = (ds.volume_m3 * 1e-9).to_dataframe(name='Volume [km$^3$]')[['Volume [km$^3$]']]
df['Length [m]'] = (ds['length_m'] / 1000).to_series()
df['Calving rate [m y$^{-1}$]'] = ds['calving_rate_myr'].to_series()
df['Forcing'] = flux
# Thresholds
deep_val = 27
dfs = df.loc[(df['Length [m]'] >= deep_val) & (df.index < 5000)]
deep_t0, deep_t1 = dfs.index[0], dfs.index[-1]
dfs = df.loc[(df['Length [m]'] >= deep_val) & (df.index > 5000)]
deep_t2 = dfs.index[0]
bump_val = 37.5
dfs = df.loc[(df['Length [m]'] >= bump_val) & (df.index < 5000)]
bump_t0, bump_t1 = dfs.index[0], dfs.index[-1]
# The plot
f, (ax1, ax2, ax3) = plt.subplots(3, 1, figsize=(9, 9), sharex=True)
ts = df['Forcing']
ts.plot(ax=ax1, color='C0')
ax1.set_ylabel(ts.name)
ts = df['Length [m]']
ts.plot(ax=ax2, color='C1')
ax2.hlines(deep_val, deep_t0, deep_t1, color='black', linestyles=':')
ax2.hlines(deep_val, deep_t2, 6000, color='black', linestyles=':')
ax2.hlines(bump_val, bump_t0, bump_t1, color='grey', linestyles='--')
ax2.annotate('Deepening', (deep_t0, deep_val-5))
ax2.annotate('Bump', (bump_t0, bump_val-5))
ax2.set_ylabel(ts.name)
# The calving rate is a bit noisy because of the bucket trick - we smooth
ts = df['Calving rate [m y$^{-1}$]'].rolling(11, center=True).max()
ts.plot(ax=ax3, color='C3')
ax3.vlines([deep_t0, deep_t1, deep_t2], ts.min(), ts.max(), color='black', linestyles=':')
ax3.vlines([bump_t0, bump_t1], ts.min(), ts.max(), color='grey', linestyles='--');
ax3.set_ylabel(ts.name); ax3.set_xlabel('Years');
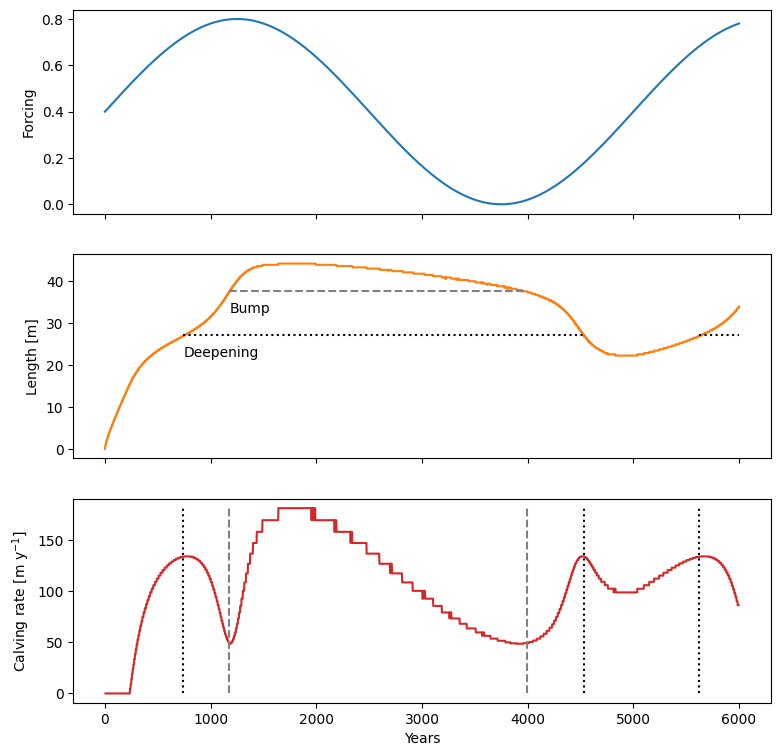
Our simple model reproduces the results of Oerlemans & Nick (2005) and Bassis & Ultee (2019) qualitatively (with the models and model parameters being different, an exact comparison is difficult). For example, here is Fig. 8 from Bassis & Ultee (2019):

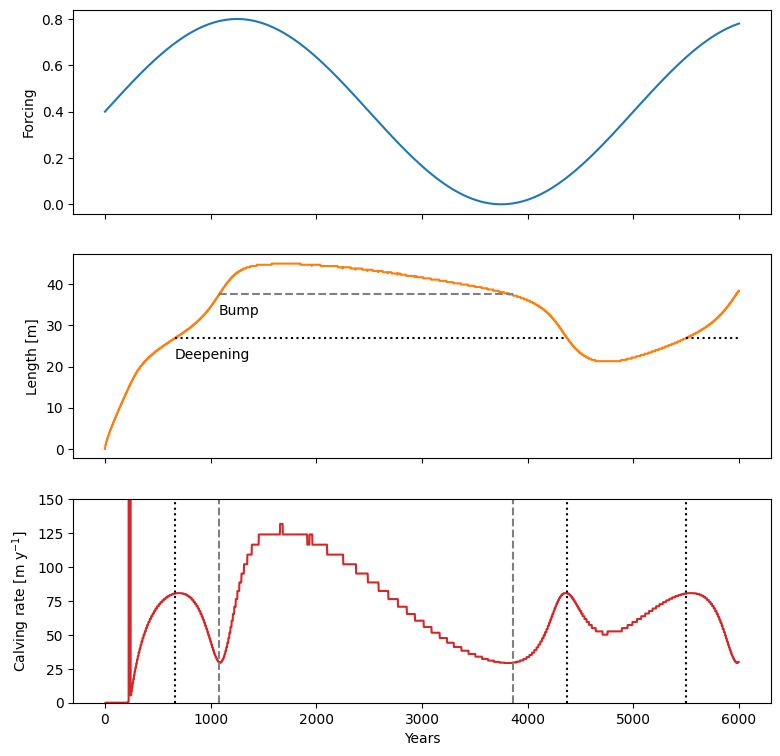
Same experiments, but with the new implementation#
Malles et al., 2023 uses the same equation but makes substantial changes to some of the physics. In a nutshell:
backpressure from the water is implemented, making physics more realistic and removing the need for the flux limiter
sliding is increased when below water
some other logics and checks that where needed to make calving more realistic in edge cases (this is a large part of the code)
it’s only implemented for the
FluxBasedModel, which is much less stable and slowier than the SemiImplicitModel used above
Otherwise, it works pretty much like the existing one:
from oggm.sandbox import calving_jan
model = calving_jan.CalvingFluxBasedModelJan(bu_tidewater_bed(), mb_model=mb_model,
is_tidewater=True,
glen_a=cfg.PARAMS['glen_a']*3, # make the glacier flow faster
flux_gate=flux_gate, # default is 0
calving_k=0.6, # default is 2.4 - Note the different value for calving here to obtain similar results as above
do_kcalving=True
)
t0 = time.time()
ds_new = model.run_until_and_store(len(flux)-1)
print('Done! Time needed: {}s'.format(int(time.time()-t0)))
Done! Time needed: 288s
2026-07-20 13:13:32: oggm.cfg: WARNING: adding an unknown parameter `ocean_density`:`1028` to PARAMS.
2026-07-20 13:13:32: oggm.cfg: WARNING: adding an unknown parameter `max_calving_stretch_distance`:`8000` to PARAMS.
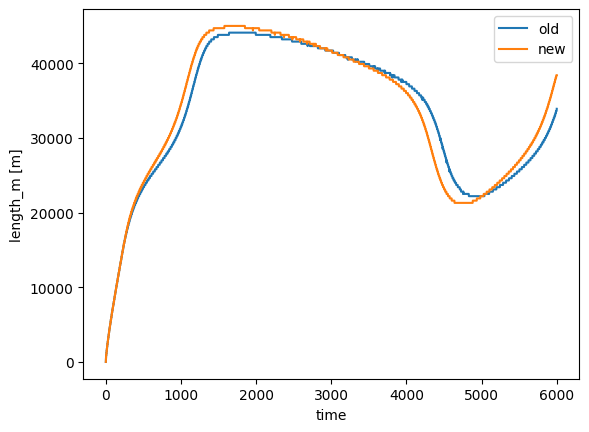
First observation is that its at least ~5× slower. Let’s have a look at the results:
# Prepare the data for plotting
df = (ds.volume_m3 * 1e-9).to_dataframe(name='Volume [km$^3$]')[['Volume [km$^3$]']]
df['Length [m]'] = (ds_new['length_m'] / 1000).to_series()
df['Calving rate [m y$^{-1}$]'] = ds_new['calving_rate_myr'].to_series()
df['Forcing'] = flux
# Thresholds
deep_val = 27
dfs = df.loc[(df['Length [m]'] >= deep_val) & (df.index < 5000)]
deep_t0, deep_t1 = dfs.index[0], dfs.index[-1]
dfs = df.loc[(df['Length [m]'] >= deep_val) & (df.index > 5000)]
deep_t2 = dfs.index[0]
bump_val = 37.5
dfs = df.loc[(df['Length [m]'] >= bump_val) & (df.index < 5000)]
bump_t0, bump_t1 = dfs.index[0], dfs.index[-1]
# The plot
f, (ax1, ax2, ax3) = plt.subplots(3, 1, figsize=(9, 9), sharex=True)
ts = df['Forcing']
ts.plot(ax=ax1, color='C0')
ax1.set_ylabel(ts.name)
ts = df['Length [m]']
ts.plot(ax=ax2, color='C1')
ax2.hlines(deep_val, deep_t0, deep_t1, color='black', linestyles=':')
ax2.hlines(deep_val, deep_t2, 6000, color='black', linestyles=':')
ax2.hlines(bump_val, bump_t0, bump_t1, color='grey', linestyles='--')
ax2.annotate('Deepening', (deep_t0, deep_val-5))
ax2.annotate('Bump', (bump_t0, bump_val-5))
ax2.set_ylabel(ts.name)
# The calving rate is a bit noisy because of the bucket trick - we smooth
ts = df['Calving rate [m y$^{-1}$]'].rolling(11, center=True).max()
ts.plot(ax=ax3, color='C3')
ax3.vlines([deep_t0, deep_t1, deep_t2], ts.min(), ts.max(), color='black', linestyles=':')
ax3.vlines([bump_t0, bump_t1], ts.min(), ts.max(), color='grey', linestyles='--')
ax3.set_ylabel(ts.name); ax3.set_xlabel('Years'); ax3.set_ylim(0, 150);
ds.length_m.plot(label="old")
ds_new.length_m.plot(label="new")
plt.legend();
What’s next?#
return to the OGGM documentation
back to the table of contents